SONAR DE LUZ DE BÚSQUEDA DE 12,1 «
Modelo
CH-500
Velocidades de entrenamiento inigualables y ecos de alta resolución
Funciones inteligentes para una pesca productiva
Esta sonda CH-500 es una de las sondas más completas y rápidas de su tipo. Proporciona 6 variaciones de paso seleccionables (6 °, 12 °, 15 °, 18 °, 21 ° y 24 °) para una alta velocidad de escaneo que puede cubrir anchos de sectores de 24 ° a 360 ° en un par de segundos. Gracias a sus altas velocidades de entrenamiento, el CH-500 puede escanear rápidamente un área grande proporcionando la mejor experiencia de pesca y navegación.
Consejo de experto: Mientras se mueve rápido, utilice el escaneo por pasos de 24 ° para poder vislumbrar los alrededores. Si detecta algo interesante, reduzca la velocidad y cambie a un ángulo de paso reducido para obtener ecos más claros.

ESPECIFICACIONES
Pantalla LCD TFT a color de 12,1 pulgadas
Resolución 768 x 1024 píxeles
Fuente de alimentación 10,5 – 30 V CC
El consumo de energía 24W
Dimensiones 342 (alto) x 318 (ancho) x 150 (profundidad) mm
Peso 9 kg (soporte M. incluido)
SECCIÓN SONAR
Frecuencia Frecuencia única
80, 140, 180 kHz
Distancia 8 rangos 0-10-2000 m
Ángulo del sector 5-360 grados (modo de sonda)
3-177 grados (modo de exploración lateral)
Ángulo de inclinación 5 – 0 – -90 grados
Modo de visualización Modo de
sonda, modo descentrado , modo de exploración inferior, modo de sonda, modo de sonda de pantalla completa
Visualización de datos Alcance, Escala de alcance, Inclinación, Diagrama de inclinación, Profundidad,
Ángulo central del rumbo, Marcador de anillo, Cursor en cruz,
Reducción de interferencias, Gráfico TVG, Escala de color,
Ganancia, Imagen de escaneo, Posición del barco, VRM,
Ángulo de sector, Temperatura del agua

Sonar Modelo FSV-85
SONAR DE ESCANEO A COLOR DE CÍRCULO COMPLETO
Características
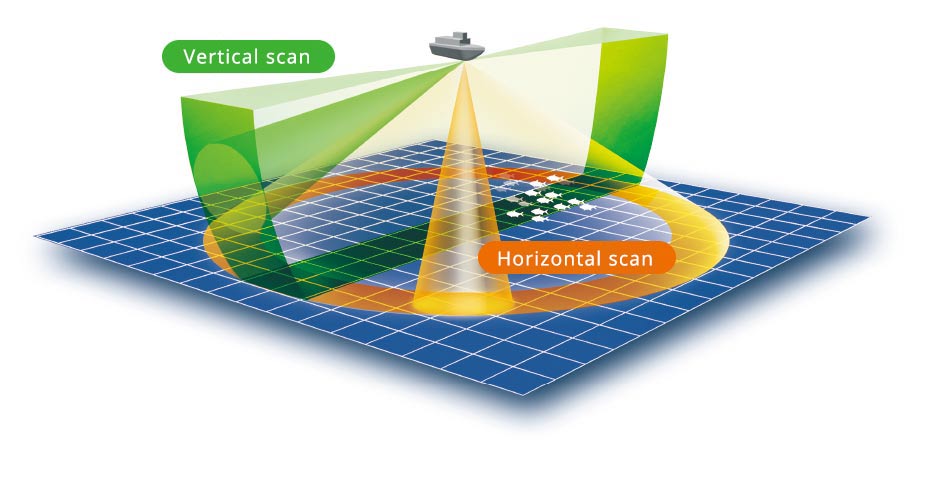
El transductor de esfera + cilíndrico proporciona una detección vertical de 90 grados
Los bancos de peces se pueden buscar desde horizontal (dirección de alcance), vertical (dirección de profundidad) con características verticales y de semicírculo.
Teclas de función para acceso directo al elemento de menú deseado
Modo de pantalla dual
Programas de usuario para la configuración de equipos con un solo toque
Operación basada en menús
El histograma de peces muestra la distribución de la intensidad de la señal del eco dentro de la marca de estimación
La marca de pescado estima la velocidad de los peces
Función de estimación de peces para comparar el volumen de dos bancos de peces
Compensación de cabeceo y balanceo para una imagen estable siempre
¿Cómo funciona el Sonar?
¿Qué es un sonar?
Un sonar es un dispositivo que utiliza ondas sonoras para detectar objetos. En la industria pesquera, se utiliza un Sonar para detectar peces, estructuras y el fondo marino alrededor de la embarcación, mientras que un buscador de peces detecta estos objetos directamente debajo de la embarcación. Un Sonar detecta estos objetos emitiendo ondas ultrasónicas al mar y detectando los ecos reflejados. El Sonar puede detectar y mostrar la distribución, densidad y movimiento de un banco de peces en un ángulo de 360 ° o 180 ° en todas las direcciones. En Japón, el sistema se utiliza en una variedad de barcos pesqueros grandes y medianos, como cerqueros, barcos de bonito, etc. En el norte de Europa, los sonares son muy populares entre los arrastreros. En los últimos años, también se están instalando sonares miniaturizados de uso general en barcos de pesca más pequeños y embarcaciones de recreo.
Diferentes tipos de Sonar
La sonda se divide en 3 categorías principales: sonda de luz de búsqueda (sonda PPI), sonda de exploración sectorial y sonda de exploración.
Sonda de luz de búsqueda (Sonda PPI)
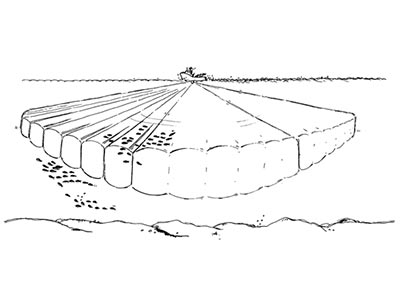
La sonda del reflector está diseñada para mostrar información submarina en una vista de 360 grados alrededor de la embarcación. El Sonar puede mostrar información como bancos de peces y corrientes marinas en una vista de 360 grados alrededor del barco girando constantemente el sensor. Es como usar una linterna para buscar algo cerca de su bote. A menudo se instala en pequeñas embarcaciones de pesca y en los últimos años se ha utilizado cada vez más en embarcaciones de recreo.
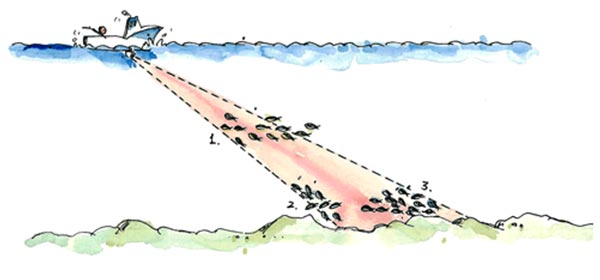
Imagen 1 de la sonda reflectora
Imagen 2 de la sonda Searchlight
El Sonar generalmente se representa en la pantalla como un punto en el centro (el barco), rodeado de ecos en un círculo alrededor del barco.
Searchlight Sonar envía ondas ultrasónicas desde el transductor (sensor) al lecho marino, donde los ecos se reflejan de regreso al transductor.
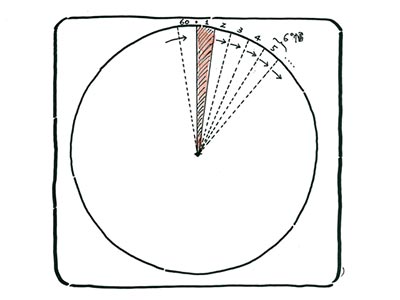
El ángulo del sensor cambia a medida que se transmite la siguiente onda ultrasónica. Tan pronto como se envían las ondas ultrasónicas, el Sonar cambia inmediatamente al estado de recepción y escucha los ecos ultrasónicos que regresan.
La sonda del reflector tiene un rango de detección de 6 grados. Al emitir ultrasonidos y luego girar el rayo secuencialmente, puede detectar bancos de peces con bastante buena precisión. Debido al ángulo de detección muy estrecho, el sensor tarda un tiempo en realizar una rotación completa y, a medida que la embarcación se mueve, es posible que algunas áreas no se detecten.
Si bien la velocidad de detección general es lenta, la miniaturización de la parte del sensor permite instalar Searchlight Sonars en embarcaciones pequeñas.
Sonda de escaneo
El Sonar de exploración emite ondas ultrasónicas alrededor de la nave durante 360 grados simultáneamente y puede detectar y mostrar los ecos que regresan al instante.
La velocidad de detección es mucho más rápida que la del sonar de escaneo, y todos los alrededores se pueden detectar instantáneamente. Puede detectar y evaluar los movimientos de peces que nadan a gran velocidad en el mar, como el bonito y el atún.
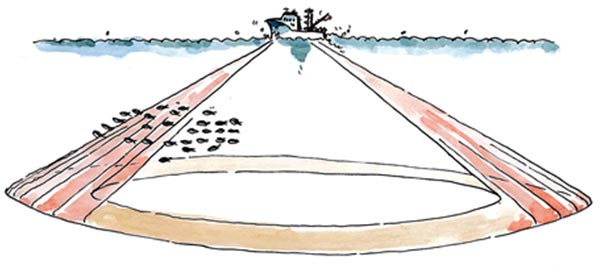
Imagen de la sonda de escaneo
Sonda de exploración de círculo completo
El sistema dispara ondas ultrasónicas en todas las direcciones alrededor del barco en una sola ráfaga y puede detectar y mostrar instantáneamente todo lo que rodea al barco.
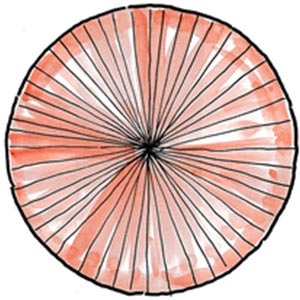
Sonda de exploración de círculo completo
Sonda de escaneo de semicírculo
Los sensores instalados en la parte inferior del barco utilizan ondas ultrasónicas para buscar instantáneamente un área de 180 grados debajo del barco.
Sonda de escaneo de semicírculo
Sonar de escaneo sectorial
El principio es el mismo que el de la sonda de búsqueda, pero la sonda de exploración de sectores busca en pasos de 45 grados, por lo que la sonda es de 4 a 7 veces más rápida que la sonda de búsqueda.
Imagen de sonda de exploración sectorial
La diferencia entre un buscador de peces y un sonar
Sonar es un buscador de peces horizontal de alto rendimiento que puede detectar y mostrar la distribución de bancos de peces en todas las direcciones alrededor de su embarcación.
Mientras que los buscadores de peces pueden detectar ecos debajo del barco, los sonares pueden detectar bancos de peces alrededor del barco, lo que lo convierte en una de las formas más eficientes de buscar peces.
Imagen de sonda (tipo reflector)
Captura de pantalla de frecuencias de Fish Finder 2
Captura de pantalla de frecuencias de Searchlight Sonar 2
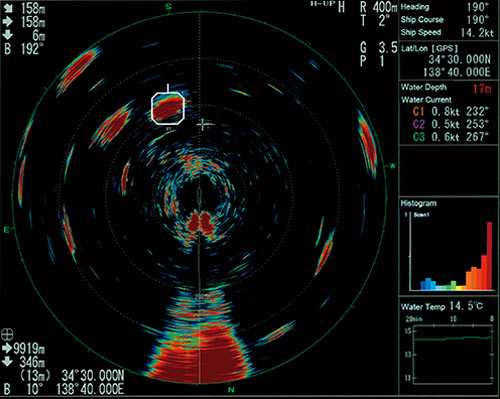
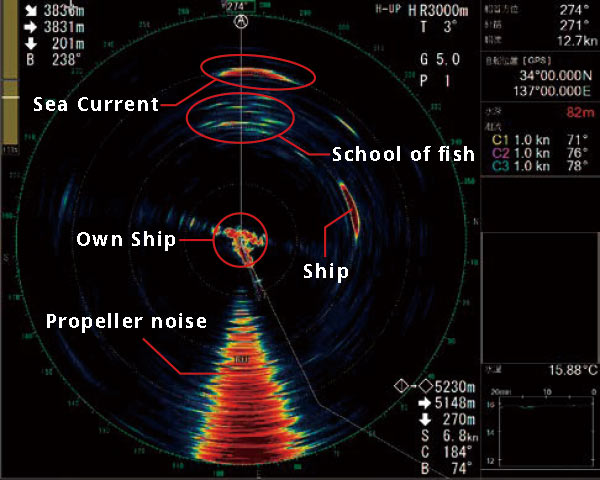
Pantalla de sonda (sonda de luz de búsqueda)
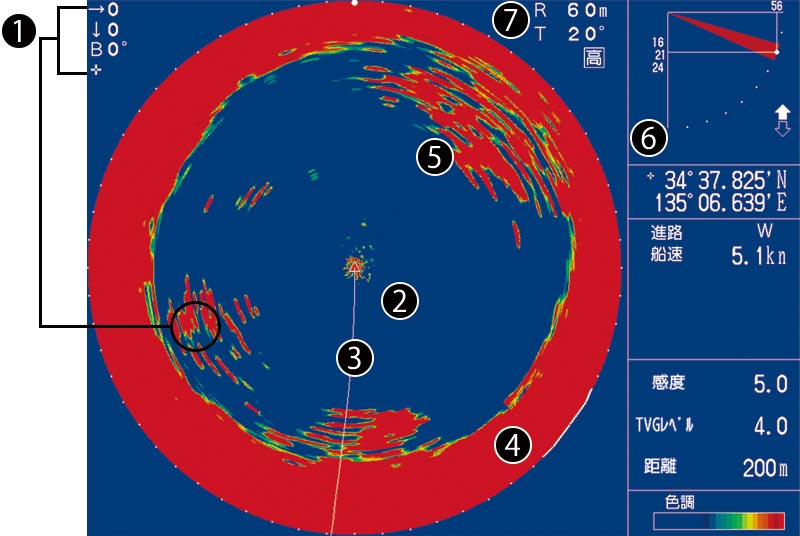
- Eco del banco de peces; si coloca el cursor sobre los ecos mostrados, muestra la distancia desde su barco hasta el banco de peces, así como la profundidad del objetivo y dónde se encuentra en relación con su barco.
- Posición del barco propio (triángulo)
- Ruta del barco (conectando un GPS)
- Eco del fondo marino (forma un anillo cuando el sensor gira)
- Eco de la corriente del mar (ubicado dentro del círculo, generalmente parece ecos irregulares)
- Inclinación de la viga (inclinación)
- Distancia
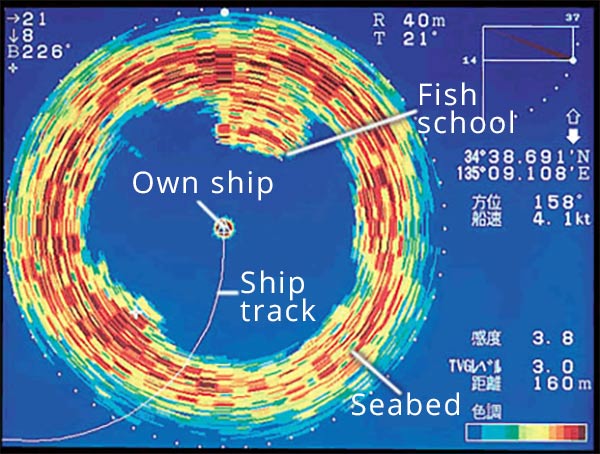
Modo de visualización horizontal
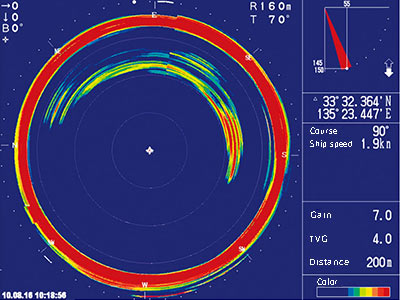
La imagen de la derecha es el modo de visualización horizontal básico de la sonda. El centro de la imagen representa la posición de la embarcación y la delgada línea blanca representa la trayectoria de la embarcación. A medida que la pista se mueve lentamente hacia la izquierda, puede deducir que el barco ha sido dirigido a babor. El círculo grande y grueso alrededor del barco es un eco del lecho marino. En este video de ejemplo, el ángulo de inclinación (o inclinación) es de 21 grados y la profundidad del agua es poco profunda, razón por la cual el eco del lecho marino es tan grande. Un gran banco de peces aparece delante del barco.
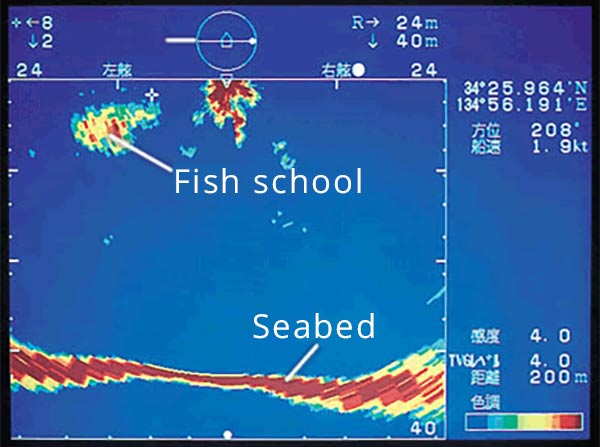
Modo de visualización de sección transversal
El Sonar muestra no solo imágenes horizontales, sino también imágenes transversales a babor y estribor, directamente debajo de su embarcación. El Sonar es ideal para observar bancos de peces desde el fondo marino hasta la superficie. La imagen de la derecha es una imagen de sección transversal de Sonar. La marca en el centro superior es la posición de su embarcación.
El Sonar detecta peces de babor a estribor mientras cambia el ángulo en el que se emite el ultrasonido. En la imagen se puede ver el eco de un banco de peces, a unos 12 metros de babor, que nada a una profundidad de unos 4 a 6 metros. La larga línea roja en la parte inferior muestra los ecos del fondo marino.
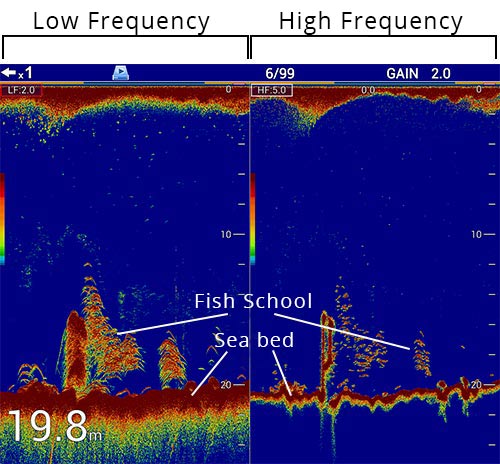
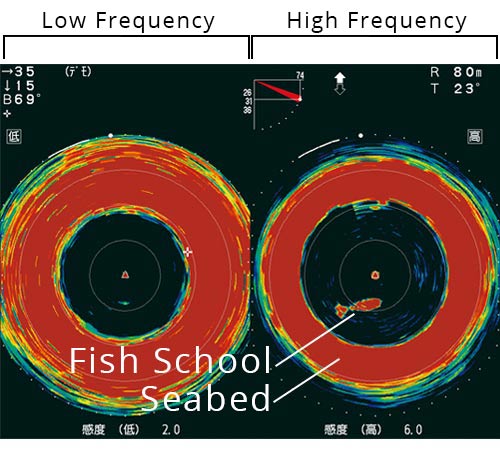
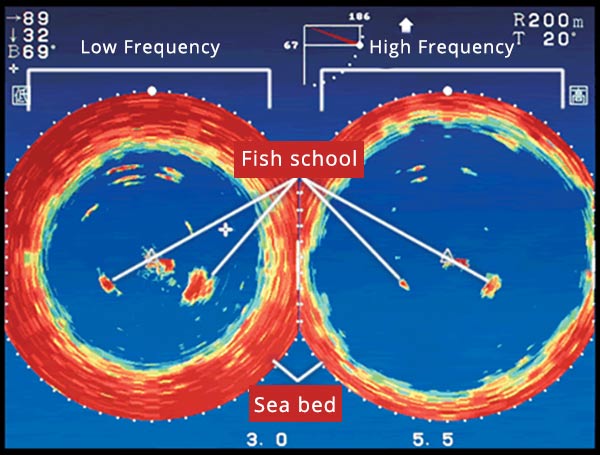
Modo de visualización de doble frecuencia
En el modo de visualización de doble frecuencia, puede buscar bancos de peces comparando imágenes de detección de alta y baja frecuencia. En la imagen de la derecha, el eco del banco de peces de la derecha es un poco más grande que el eco de la izquierda. Puede deducir que el mejor objetivo podría ser el de la derecha representado por un eco más grande.
Pantalla de sonda (sonda de exploración)
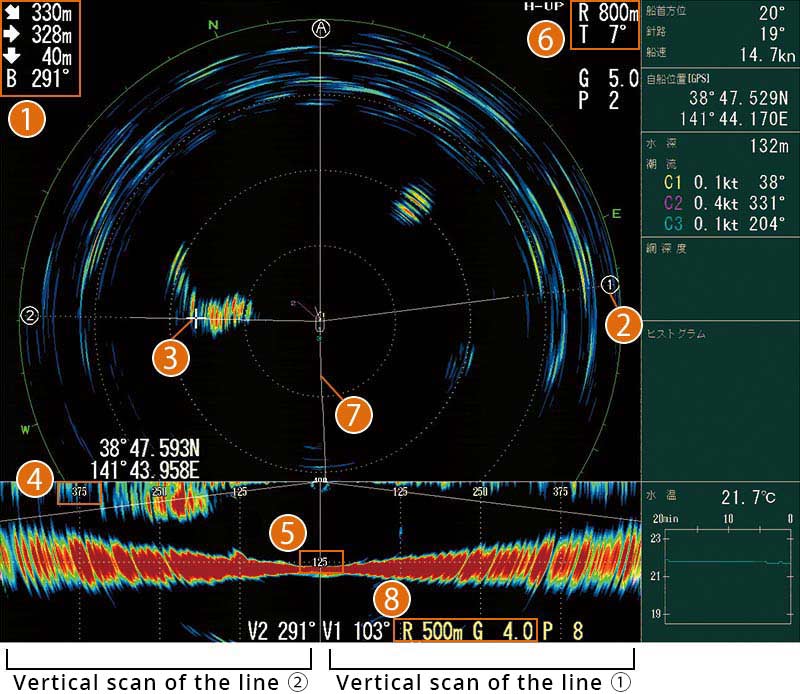
- Al pasar el cursor sobre el eco objetivo, este cuadro de datos muestra la distancia horizontal y vertical al barco propio, así como la profundidad y la dirección del objetivo.
- Escaneo vertical de la línea ①
- Cursor (actualmente en el banco de peces)
- Modo vertical, rango horizontal (distancia)
- Modo vertical, rango de profundidad
- Rango de modo horizontal, inclinación del haz (inclinación), modo de visualización
- Ruta del barco propio (conectando un GPS)
- Rango de modo vertical, ganancia
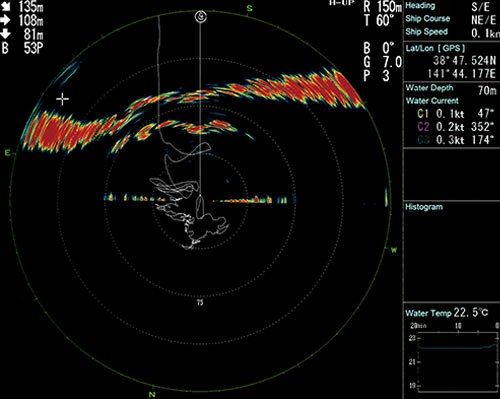
Modo de visualización horizontal
La imagen de la derecha es la imagen básica de la sonda en modo de visualización horizontal. El centro de la imagen es la posición del barco, mientras que la delgada línea blanca adjunta representa la trayectoria del barco. En la imagen, parece haber un eco de un banco de peces ubicado a 2 km por delante del bote.
Detrás de este eco, hay otro eco, probablemente el de una corriente marina. A medida que la pista se mueve lentamente hacia la derecha, puede deducir que el barco se ha dirigido a estribor. Finalmente, a la derecha, se oye el eco de un barco que navega paralelo a nuestro barco.
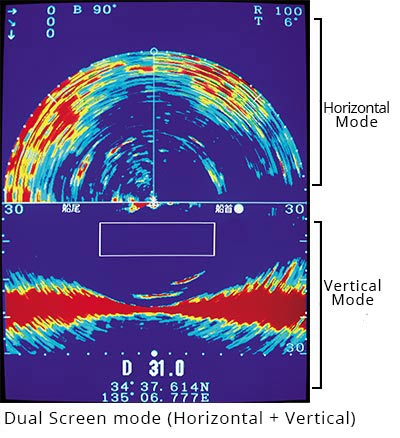
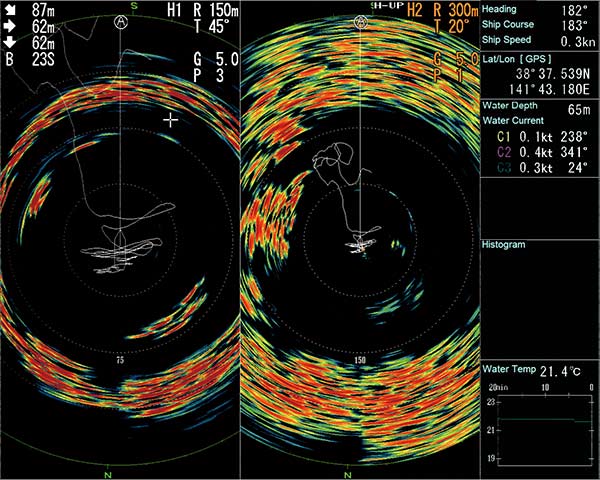
Modo de visualización de pantalla dual
Se pueden mostrar dos modos de sonda al mismo tiempo. Cada modo se puede ajustar y configurar independientemente del otro. La posición (izquierda o derecha) y el tamaño se pueden ajustar libremente según el método de pesca.
En la imagen de la derecha, la sonda está en modo de pantalla dual y frecuencia dual. La alta frecuencia se muestra a la izquierda y la baja a la derecha. Comparando los dos modos, se puede detectar un banco de peces bastante grande en la parte inferior derecha y otro a la izquierda, y esto se ve fácilmente gracias a la configuración de pantalla dual.
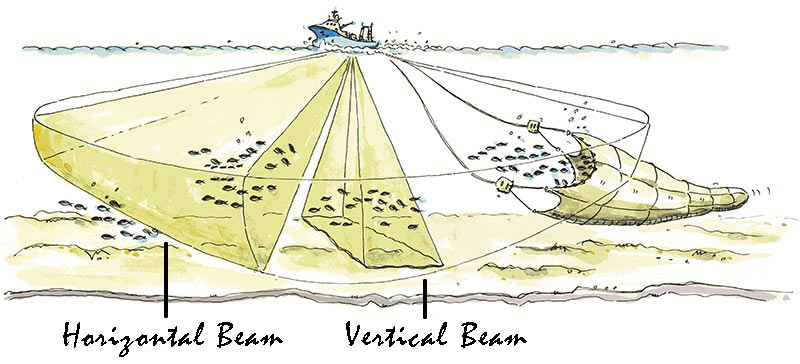
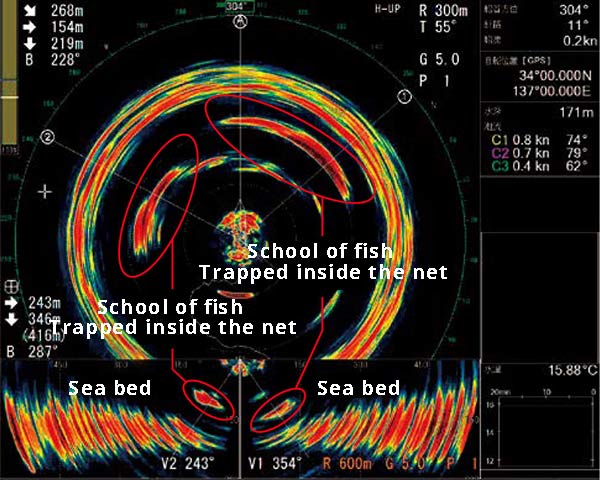
Modo de visualización de orientación dual horizontal y vertical
En la imagen podemos ver claramente la acción de la red sobre el pez una vez cerrada para evitar que se escape: los peces quedan «envueltos» por la red, por lo que el eco aparece regular y muy compacto.
Al especificar la dirección en la que desea mirar, puede agregar hasta dos modos verticales adicionales que cubrirán un ángulo de 90 grados (desde la superficie horizontal del mar hasta el lecho marino debajo del barco). Es muy útil comparar dos ecos diferentes en dos direcciones diferentes.
Estructura del Sonar
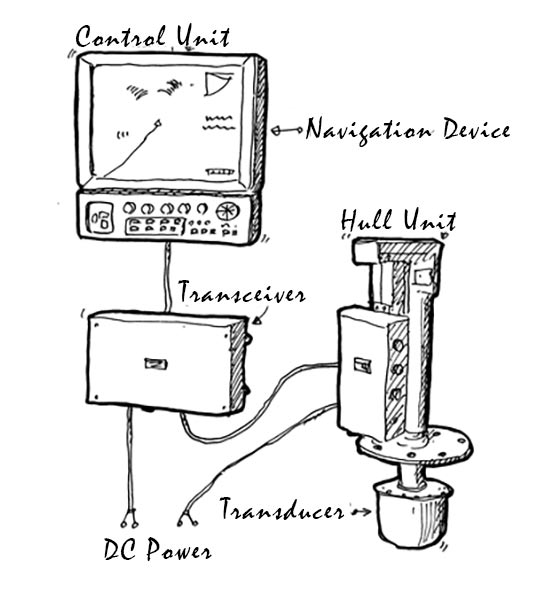
Configuración estándar de la sonda Searchlight
La imagen de la derecha muestra la configuración estándar de una sonda Searchlight. Esta configuración consta de un monitor, una unidad de control, un transceptor y la unidad de casco que contiene un transductor (el sensor).
El rango de detección es de 10 a 2400 m (dividido en 15 pasos) y hay dos tipos de sonda: sonda de frecuencia única y sonda de frecuencia dual.
Frecuencia única: 60/80/150/180/240 kHz,
frecuencia dual: 60/153 y 85/218 kHz
La unidad de casco, con un rango de recorrido de 25 a 40 cm, se instala en la parte inferior del barco. Por lo general, cuanto más larga sea la carrera (longitud del eje), menor será la probabilidad de que el transductor se vea afectado por las burbujas de aire circundantes.
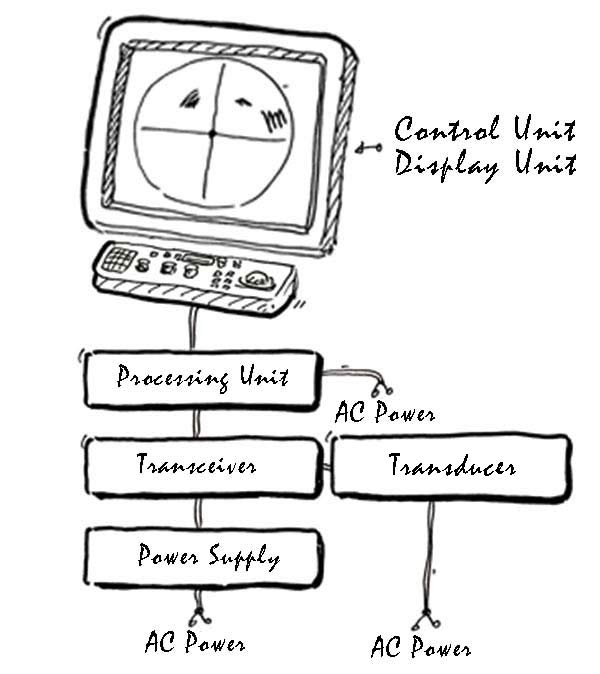
Configuración de la sonda de exploración
La imagen de la derecha muestra la configuración estándar de una sonda de exploración. Esta configuración consta de un monitor, una unidad de control, una unidad de procesamiento, un transceptor y la unidad de casco que contiene un transductor (el sensor).
El rango de detección depende de la frecuencia y la potencia de salida, pero el rango horizontal máximo es de 5000 m.
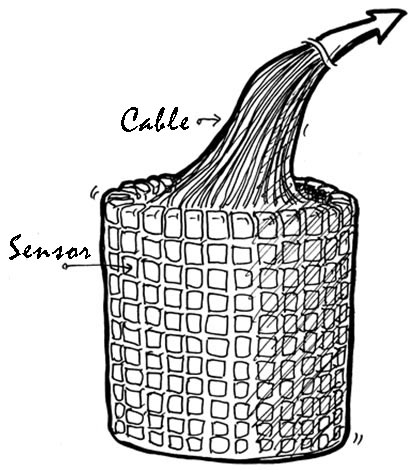
Unidad de casco y transductor
Cuando la embarcación se mueve a alta velocidad, los objetos que flotan en el agua pueden dañar el transductor. La resistencia al agua también reducirá la velocidad de la embarcación y aumentará el consumo de combustible. Por lo tanto, se recomienda retraer el transductor cuando se viaja a alta velocidad y solo bajarlo cuando se busca peces.
Una vez que se baje el transductor, podrá emitir ultrasonidos.
El diseño de la unidad de casco varía según el modelo, desde 40/60 cm para configuraciones pequeñas hasta 130/160 cm para embarcaciones más grandes.
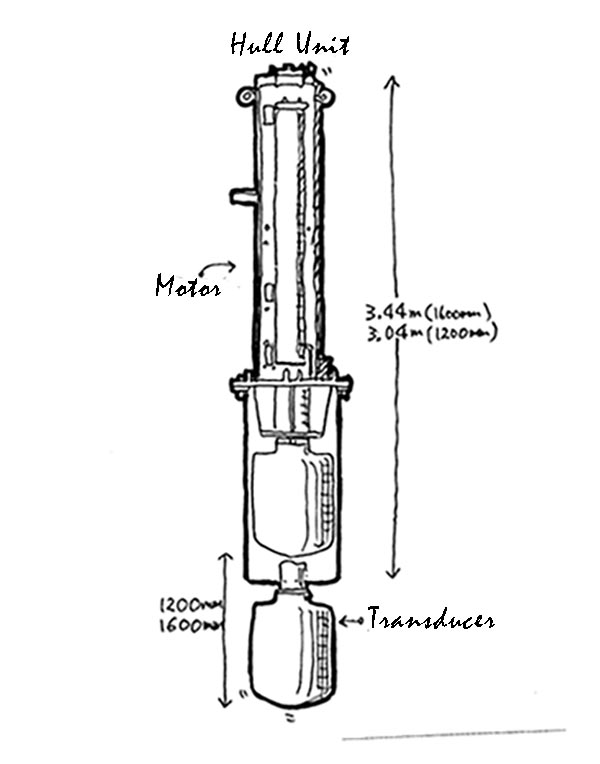
El transductor consta de aproximadamente 1000 pequeños sensores, dispuestos en una matriz horizontal y vertical para detectar objetos en todas las direcciones alrededor de la embarcación. El transductor emite ondas ultrasónicas en todas las direcciones al mismo tiempo y recibe los ecos que regresan. Gracias a la cantidad de pequeños sensores, es fácil determinar la dirección y la distancia a la que se encuentra un banco de peces con gran precisión.
La sonda de exploración está controlada por un ciclo de temporizador que cambia secuencialmente los sensores para comprobar la dirección de cualquier señal reflejada.